|
|

|

|
| e-Pub |
Section: New Results
Physically-Based Simulation and Multisensory Feedback
Interactive Physically-Based Simulation
Aggregate constraints for virtual manipulation with soft fingers, Maud Marchal, Anthony Talvas
|

Interactive dexterous manipulation of virtual objects remains a complex challenge that requires both appropriate hand models and accurate physically-based simulation of interactions. In [16] , we proposed an approach based on novel aggregate constraints for simulating dexterous grasping using soft fingers. Our approach aims at improving the computation of contact mechanics when many contact points are involved, by aggregating the multiple contact constraints into a minimal set of constraints. We also introduced a method for non-uniform pressure distribution over the contact surface, to adapt the response when touching sharp edges. We used the Coulomb-Contensou friction model to efficiently simulate tangential and torsional friction. We showed through different use cases that our aggregate constraint formulation is well-suited for simulating interactively dexterous manipulation of virtual objects through soft fingers, and efficiently reduces the computation time of constraint solving. This work was done in collaboration with Christian Duriez (Inria team DEFROST) and Miguel Otaduy (Univ. Rey Juan Carlos, Madrid, Spain).
Multimodal Feedback
Elastic-Arm: Human-scale passive feedback for augmenting interaction and perception in virtual environments Merwan Achibet, Adrien Girard, Maud Marchal, Anatole Lécuyer
|
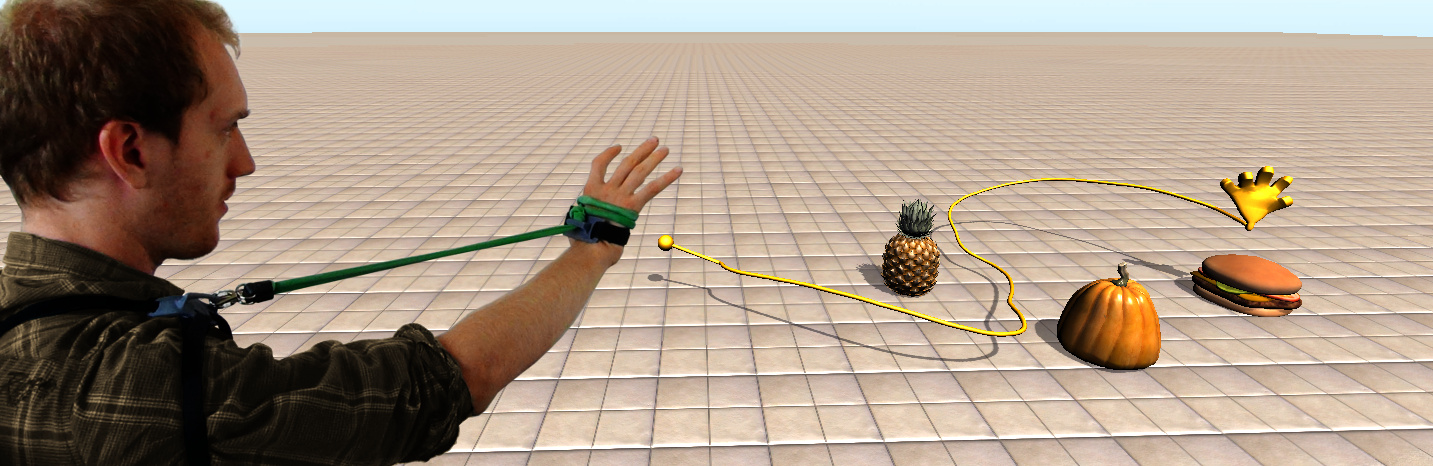
Haptic feedback is known to improve 3D interaction in virtual environments but current haptic interfaces remain complex and tailored to desktop interaction. In [18] , we introduced the ElasticArm, a novel approach for incorporating haptic feedback in immersive virtual environments in a simple and cost-effective way. The Elastic-Arm is based on a body-mounted elastic armature that links the user's hand to her shoulder. As a result, a progressive resistance force is perceived when extending the arm. This haptic feedback can be incorporated with various 3D interaction techniques and we illustrate the possibilities offered by our system through several use cases based on well-known examples such as the Bubble technique, Redirected Touching, and pseudo-haptics. These illustrative use cases provide users with haptic feedback during selection and navigation tasks but they also enhance their perception of the virtual environment. Taken together, these examples suggest that the Elastic-Arm can be transposed in numerous applications and with various 3D interaction metaphors in which a mobile haptic feedback can be beneficial. It could also pave the way for the design of new interaction techniques based on human-scale egocentric haptic feedback.
Visual vibrations to simulate taps on different materials Maud Marchal, Anatole Lécuyer
In [40] , we presented a haptic visualization technique for conveying material type through visual feedback, expressed as visible decaying sinusoidal vibration resulting from tapping an object. The technique employs cartoon-inspired visual effects and modulates the scale of the vibration to comply with visual perception. The results of a user study showed that participants could successfully perceive three types of material (rubber, wood, and aluminum) using our novel visual effect. This work was done in collaboration with Taku Hachisu and Hiroyuki Kajimoto (Univ. of Electro Communication, Tokyo, Japan).
GPU-based Collision Detection in Virtual Environments
GPU Ray-Traced Collision Detection: Fine Pipeline Reorganization François Lehericey, Valérie Gouranton, Bruno Arnaldi
Ray-tracing algorithms can be used to render a virtual scene and to detect collisions between objects. Numerous ray-tracing algorithms have been proposed which use data structures optimized for specific cases (rigid objects, deformable objects, etc.). Some solutions try to optimize performance by combining several algorithms to use the most efficient algorithm for each ray. In [31] , we presented a ray-traced collision detection pipeline that improves the performance on a graphic processing unit (GPU) when several ray-tracing algorithms are used.
When combining several ray-tracing algorithms on a GPU, a well-known drawback is thread divergence among work-groups that can cause loss of performance by causing idle threads. We avoid branch divergence by dividing the ray tracing into three steps with appended buffers in between. We also show that prediction can be used to avoid unnecessary synchronizations between the CPU and GPU. Applied to a narrow-phase collision detection algorithm, results show an improvement of performance up to 2.7 times.
|
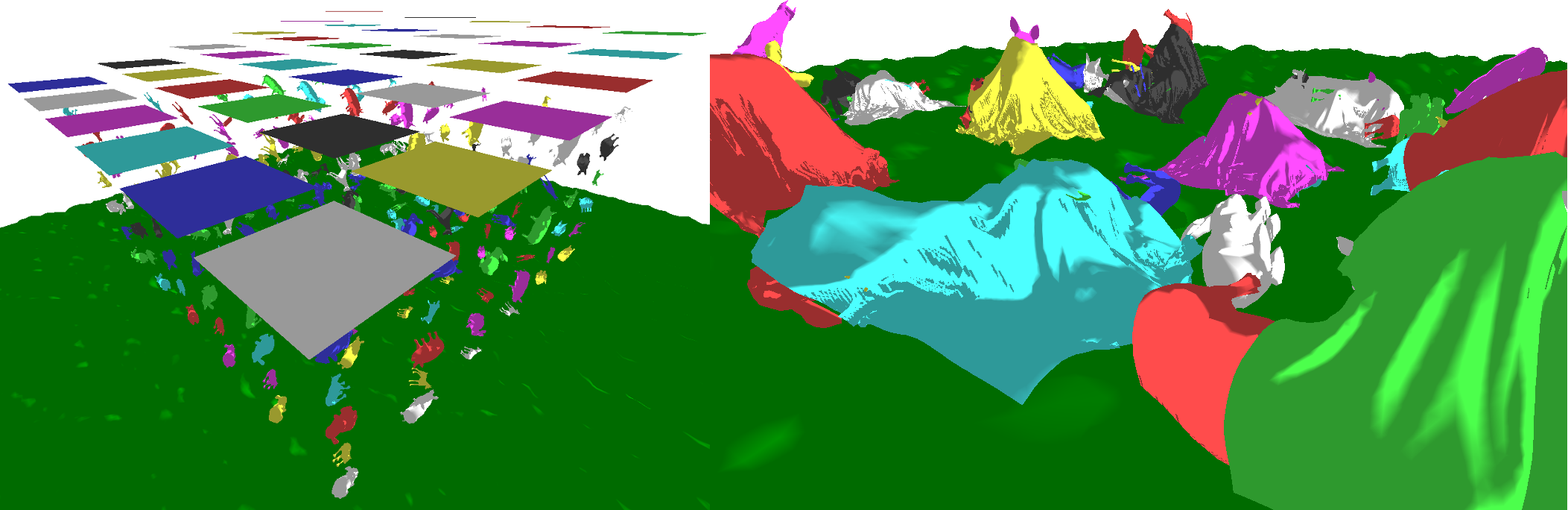
GPU Ray-Traced Collision Detection for Cloth Simulation François Lehericey, Valérie Gouranton, Bruno Arnaldi
|
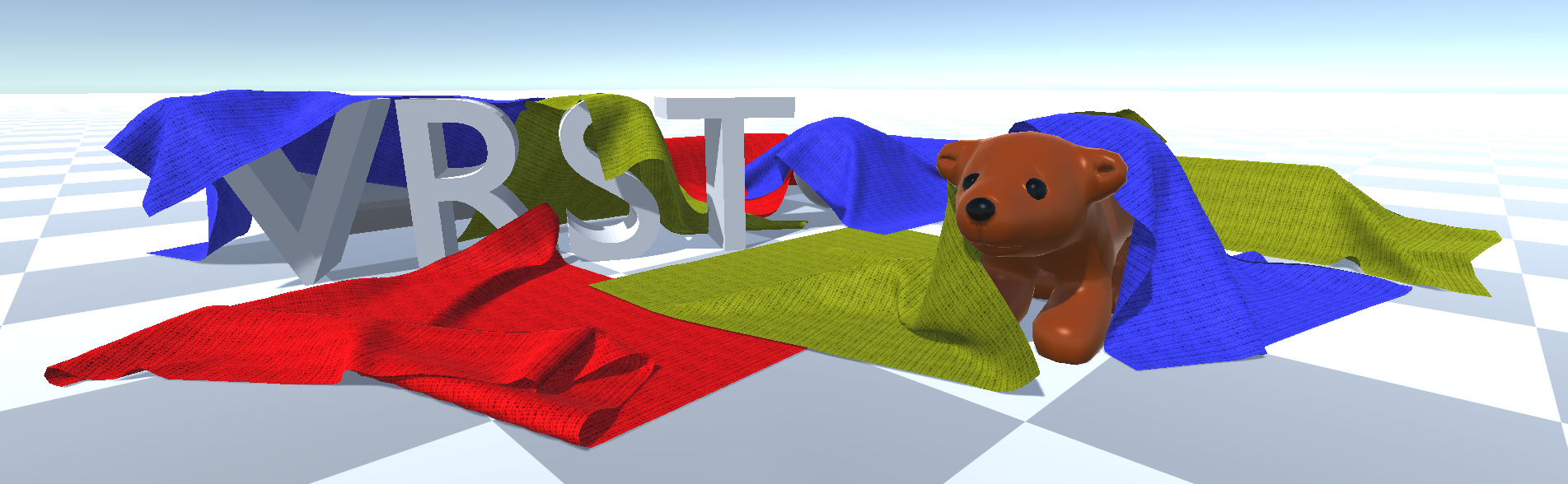
In [30] , we proposed a method to perform collision detection with cloths with ray-tracing at an interactive frame-rate. Our method is able to perform collision detection between cloths and volumetric objects (rigid or deformable) as well as collision detection between cloths (including auto-collision). Our method casts rays between objects to perform collision detection, and an inversion-handling algorithm is introduced to correct errors introduced by discrete simulations. GPU computing is used to improve the performances by parallelizing the ray-tracing. Our implementation handles scenes containing deformable objects at an interactive frame-rate, with collision detection lasting a few milliseconds.
Medical Applications
Real-time tracking of deformable targets in 3D ultrasound images Maud Marchal
In [35] , [36] , we presented a novel approach for tracking a deformable anatomical target within 3D ultrasound volumes. Our method is able to estimate deformations caused by the physiological motions of the patient. The displacements of moving structures are estimated from an intensity-based approach combined with a physically-based model and has therefore the advantage to be less sensitive to the image noise. Furthermore, our method does not use any fiducial marker and has real-time capabilities. The accuracy of our method is evaluated on real data acquired from an organic phantom. The validation is performed on different types of motions comprising rigid and non-rigid motions. Thus, our approach opens novel possibilities for computer-assisted interventions where deformable organs are involved.
Our approach was also evaluated on the MICCAI CLUST'15 challenge 3D database. We achieved a mean tracking error of mm with an average computation time of 350 ms per frame, ranking our method first during the on-site challenge [34] . This work was done in collaboration with Lucas Royer, Anthony Le Bras and Guillaume Dardenne (IRT bcom), and Alexandre Krupa (Inria team LAGADIC).
Statistical study of parameters for deep brain stimulation automatic pre-operative planning of electrodes trajectories Maud Marchal
Automatic methods for pre-operative trajectory planning of electrodes in Deep Brain Stimulation are usually based on the search for a path that resolves a set of surgical constraints to propose an optimal trajectory. In [13] , we studied the use of parameters based on real trajectories of surgeons. For that purpose we firstly retrieve the actual weighting factors used by neurosurgeons thanks to a retrospective study, secondly we compare the results from two different hospitals to evaluate their similarity, and thirdly we compare these trends to the weighting factors usually empirically set in most current approaches. We proposed two approaches, one based on a stochastic sampling and the other on an exhaustive search. In each case, we get a sample of combinations of weighting factors along with a measure of their quality, i.e. the similarity between the optimal trajectory they lead to and the trajectory manually planned by the surgeon as a reference. Then visual and statistical analysis are performed on the number of occurrences and on the rank means. We performed our study on 56 retrospective cases from two different hospitals.We could observe a trend of the occurrence of each weight on the number of occurrences. We also proved that each weight had a significant influence on the ranking. Additionally, we observed no influence of the medical center parameters, suggesting that the trends were comparable in both hospitals. Finally, the obtained trends were confronted to the usual weights chosen by the community, showing some common points but also some discrepancies. These results tend to show a predominance of the choice of a trajectory close to a standard direction. Secondly, the avoidance of the vessels or sulci seems to be sought in the surroundings of the standard position. The avoidance of the ventricles seem to be less predominant, but this could be due to the already reasonable distance between the standard direction and the ventricles. The similarity of results between two medical centers tend to show that it is not an exceptional practice. This work was done in collaboration with Caroline Essert and Antonio Capobianco (Univ. Strasbourg), Claire Haegelen and Pierre Jannin (LTSI, Rennes), Sara Fernandez-Vidal, Carine Karachi and Eric Bardinet (Institut du Cerveau et de la Moëlle Epinière, Paris).